We study how muscle properties affect limb movements. Once we understand the fundamental properties, we can study how changes in these properties affect movement and ultimately performance (speed, distance, accuracy). Click to expand an arrow below for specific examples of what we study.
Subjects
Frogs
Red leg running frogs, Amazon milk frogs, African clawed frogs, Common tree frogs
Humans
young people, middle-aged people, elderly people
Movements
- Locomotion (jumping, walking, swimming)
- Goal-directed reaching
Properties
Physiology
Intrinsic muscle properties (contractile speeds, rates of force & relaxation); motor unit properties (motor unit numbers and firing rates)
Anatomy
Muscle (moment arms, bi-articular connections) & tendon properties (stiffnesses, lengths)
Methods
Experimental biomechanics, functional anatomy, modelling (robots & computer simulations)
With the above examples, there are myriads of important questions we can ask. For an example, try to construct one yourself. How do [property(s)] affect [subject’s] ability to perform [movement]? To answer this we can use [method(s)].
Our ongoing research follows 3 strands of work:
1-Biomechanics of frog locomotion
We study how frogs coordinate their muscles and joints to achieve high-performance locomotion. To understand this, we must quantify their movements (kinematics), internal forces (joint torques, muscle forces) and external forces (ground reaction forces, hydrodynamic forces). Because behaviour is the bi-product of the interactions between internal and external forces, we must study all of the components holistically. For example we cannot know how far a frog will jump based muscle properties alone – we also need to consider how the muscles attach to the skeleton, how they coordinate and how effectively the limb interacts with the ground (e.g. longer legs help jumping). Likewise, we cannot predict jumping performance based on the leg length alone because the muscle strength-speed properties must be appropriate for the mechanical leverage of the limb (muscle moment arms and gearing).
Unfortunately, measuring forces is extremely challenging so we use a combination of non-invasive experimental techniques, computer modelling and robotic modelling.
2-Motor control of goal-directed reaching
We study how neuromuscular properties affect “goal-directed reaching” (e.g. reaching for a coffee mug). Specifically, muscles have internal properties that are independent of neural control. Examples include maximum shortening speed, the speed of force rise (and relaxation), maximum force and connective tissue stiffness.These properties profoundly influence how the brain controls limb movements. We are currently exploring how muscle properties affect reaching accuracy and speed.
Goal-directed reaching, or any motor control task, is multi-faceted, involving neural, muscular and mechanical processes. Computational methods are our best tool to isolate how a single component (e.g. muscle) affects the behaviour of the entire motor system. Using “numerical experimentation”, we manipulate a single parameter (e.g. max muscle speed) whilst leaving others constant. Further, we can factorially alter all parameters with respect to all other parameters to create a detailed map between muscle properties and motor performance. This is impossible in living subjects because parameters vary in ways we cannot control or predict.
3-Neuromechanics of muscular ageing
We study how ageing affects fine motor control. As explained above, muscles have internal properties which help dictate how the brain controls movement. Prior work has found that these properties change with age. Specifically, ageing causes muscles to be weaker, slower and stiffer. A big unknown is how does ageing musculature affect the brain’s ability to control movement? Do we lose fine motor skills with age because of muscle degradation (or because of neural and/or cognitive decline)? Can we mitigate the physiological effects of age by training our brain for better control?
Our research in this area is relatively new and we are currently working intensively to answer the above questions using computational methods. We hope to develop complementary experimental techniques in the near future.
Strand 1-Biomechanics of frog locomotion
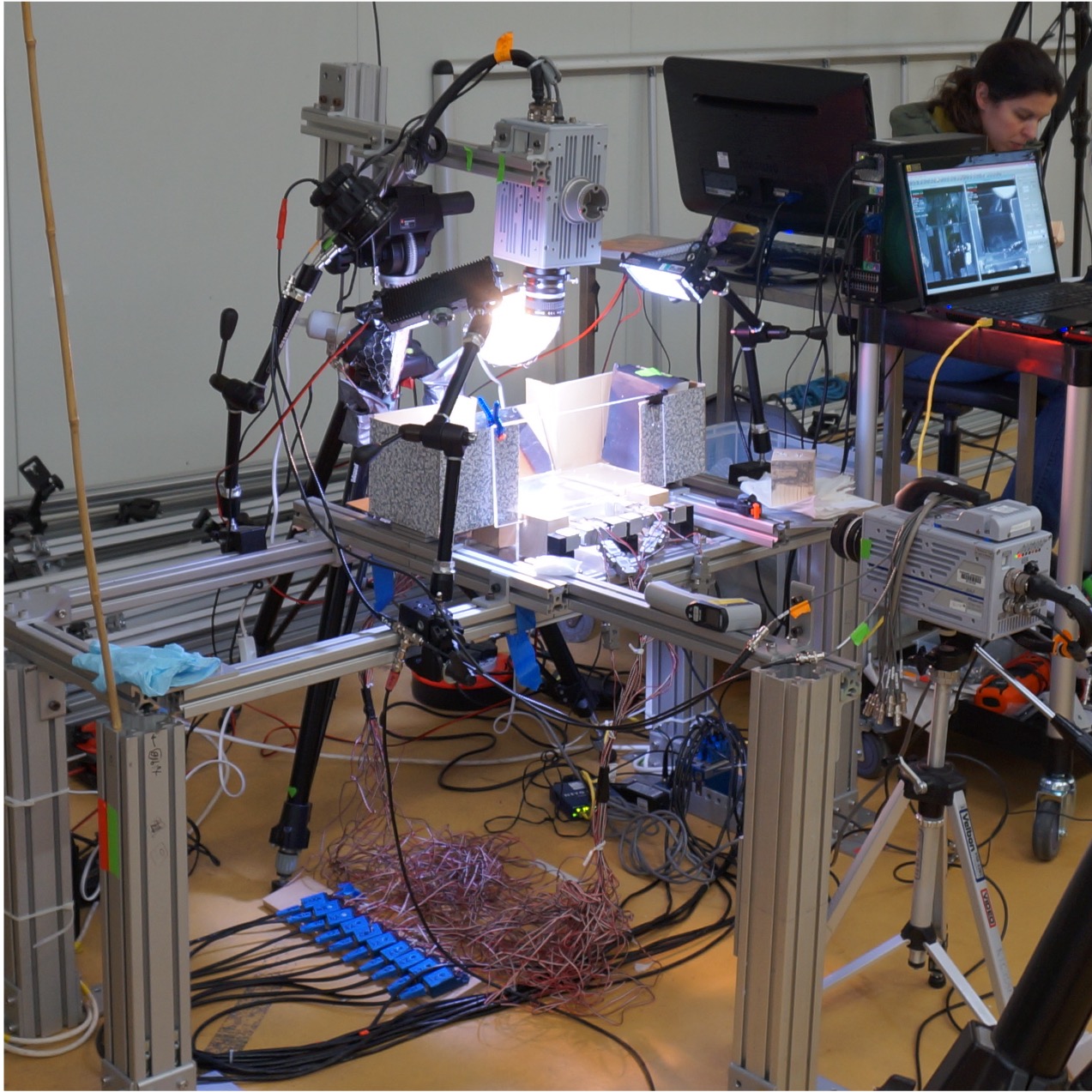
|experimental biomechanics
The core of our work is high-speed video and force recordings for quantifying the movements of the limbs and body. All of our work is rooted in quantitative observations of animal behaviour (kinematics).
|functional anatomy
We use micro-CT images to reconstruct 3D anatomy to create “digital marionettes”. Using kinematics data, we animate our marionettes, allowing us to non-invasively probe how muscles & bones move.
|robotics & modelling
From anatomy & kinematics data, we create conceptual models containing only the most salient features. We study these in greater depth using robotic or computational models.
|experimental biomechanics

some frogs prefer walking
Frogs use intricate limb movements to coordinate upward versus forward motion.
…
|functional anatomy
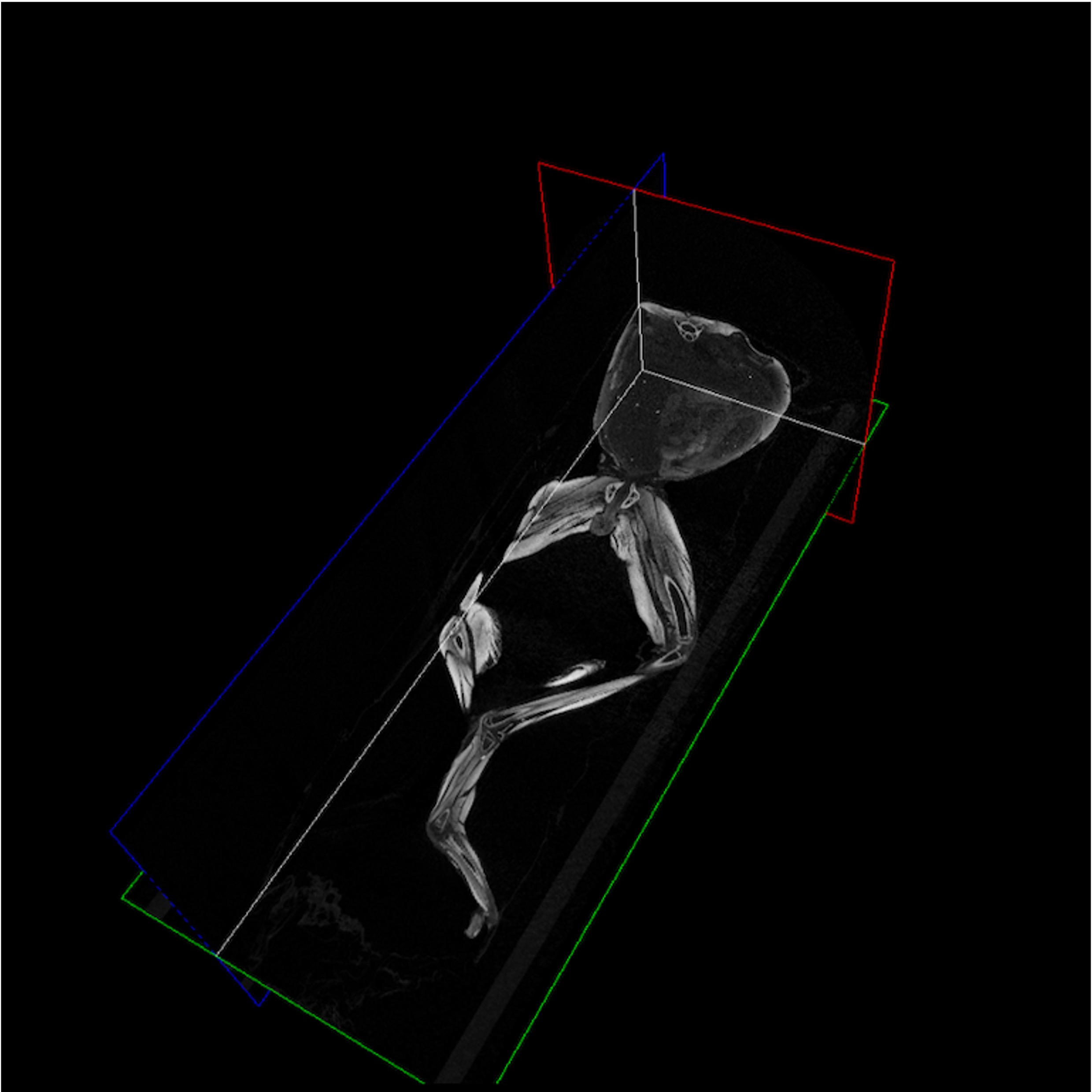
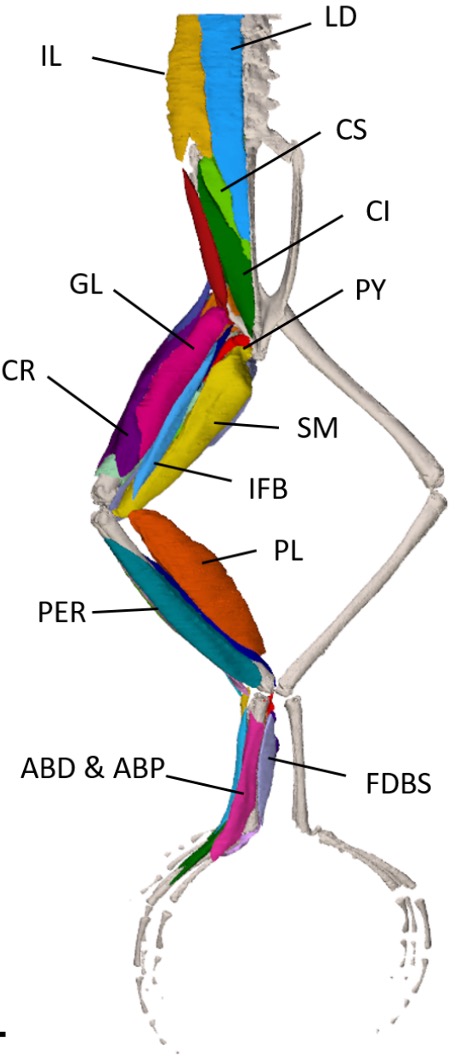
3D digital anatomical reconstruction
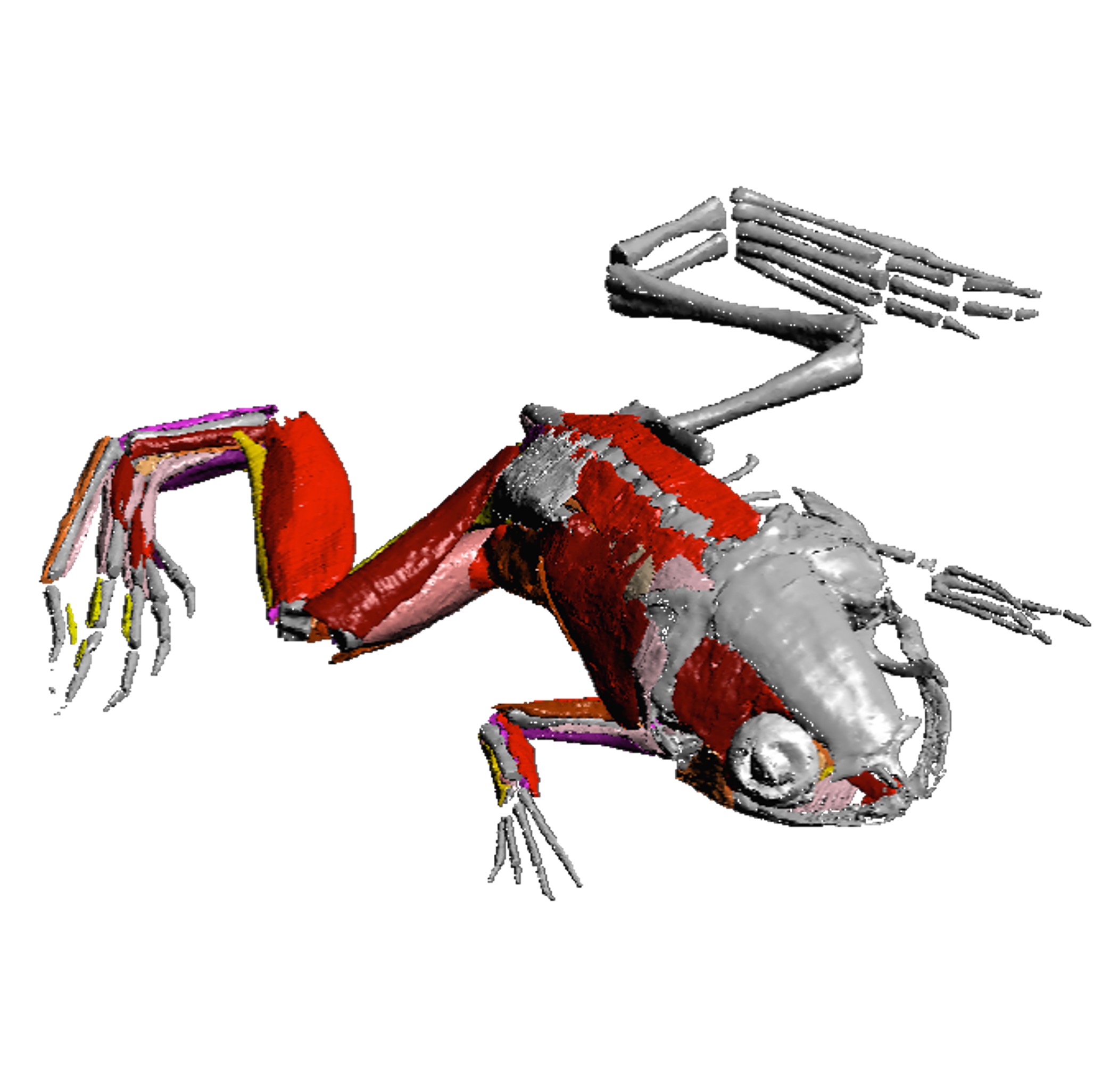
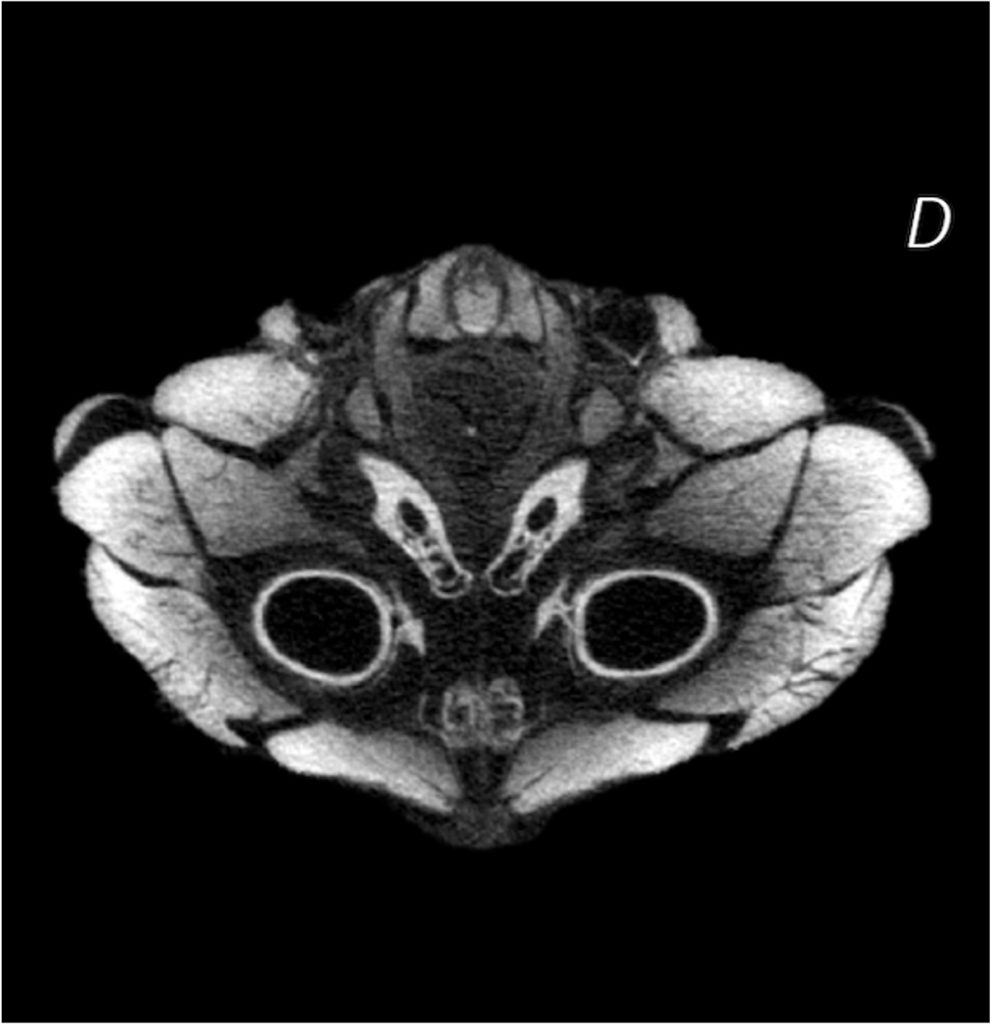
We “segment” micro-CT images to accurately reconstruct 3D anatomy, making digital specimens for non-destructive and quantitative dissection. These help us understand how the evolution of behaviour is linked to musculoskeletal anatomy. These reconstructions are also inputs for further computational modelling.
…
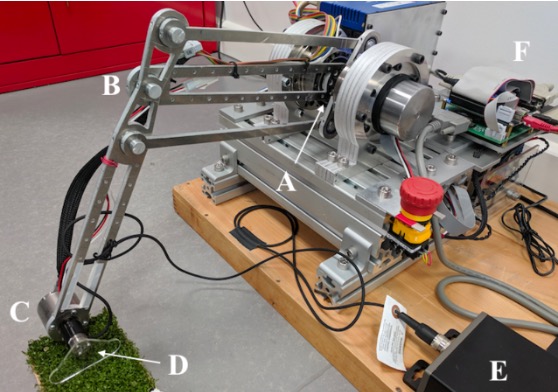
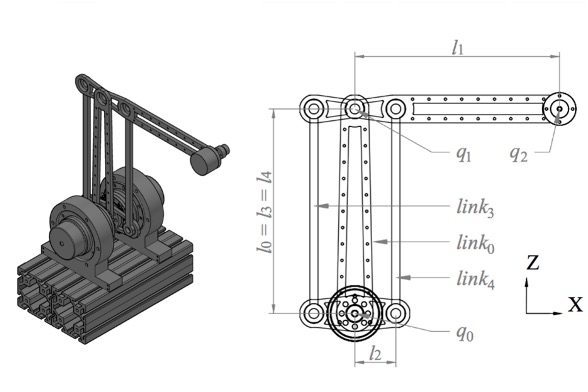
|robotics & modelling
Musculo-robotics
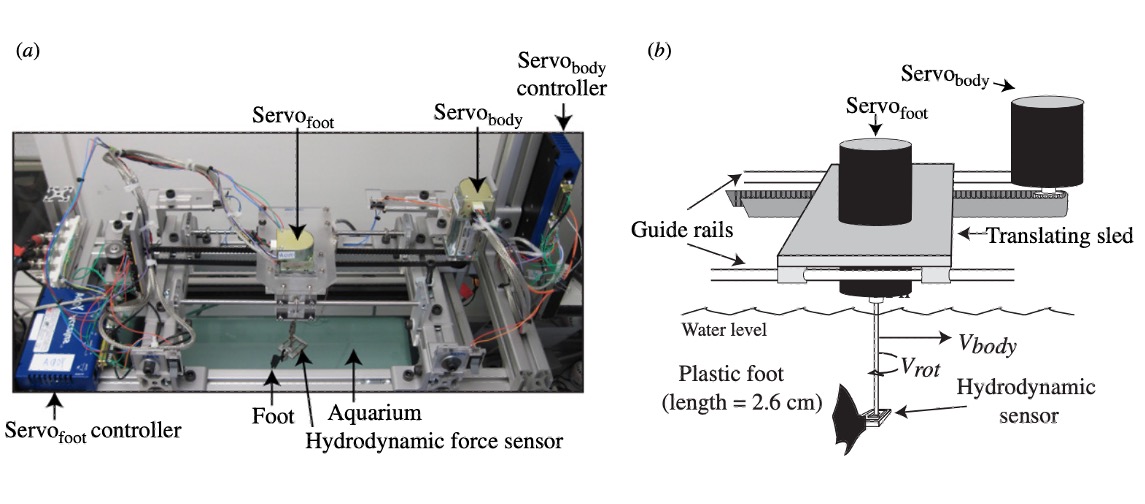
A robotic model of a frog foot mimics a swimming motion. The robotic motors are programmed to behave like biological muscle, meaning that the force (torque) exerted on the water is the outcome of both the neural input and the resistance of the mechanical environment (water).
Model of muscle actions
Theoretical kinematics
Frogs may use a simple rule to coordinate their leg movements. A mathematical frog using this rule is able to jump naturally. The rule: rotate the leg segments along the shortest path in rotational space. We adapted this from computer animation theory.
Strand 2-Motor control of goal-directed reaching
|musculoskeletal modelling

We create simplified models of the human arm. A neural controller coordinates shoulder, elbow and wrist muscles to guide the hand towards a stationary target. It is the basis for our motor unit and muscle ageing work.
|motor unit modelling

We develop a mathematical frameworks for modelling multiple motor units. Vertebrate muscle has two basic features a) rate-coded force generation and b) multiple motor units. We are studying how these features influence fine motor control.
|musculoskeletal modelling
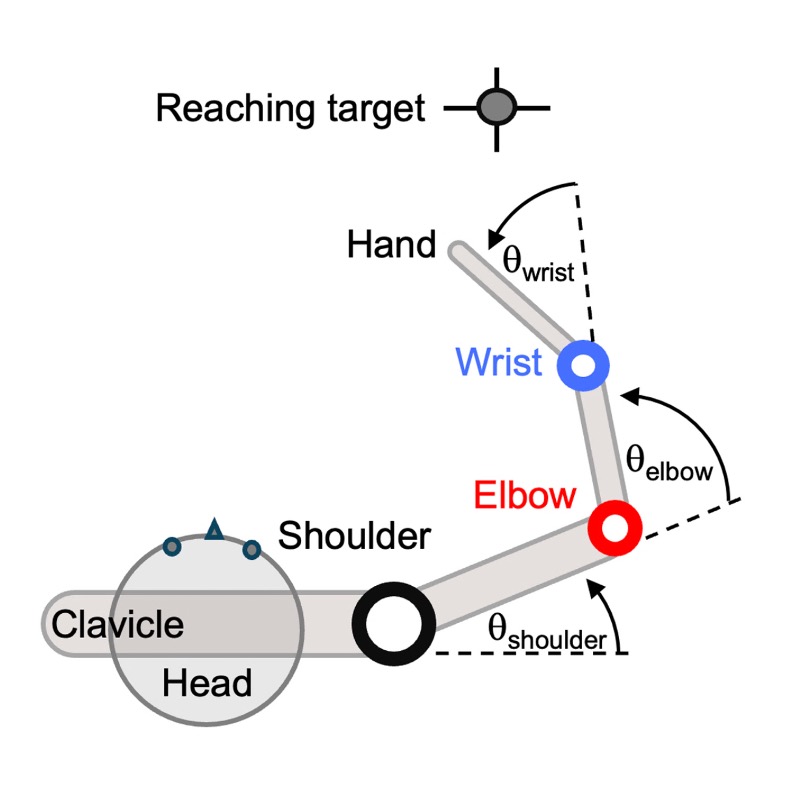
Conceptual model (top view of right arm)
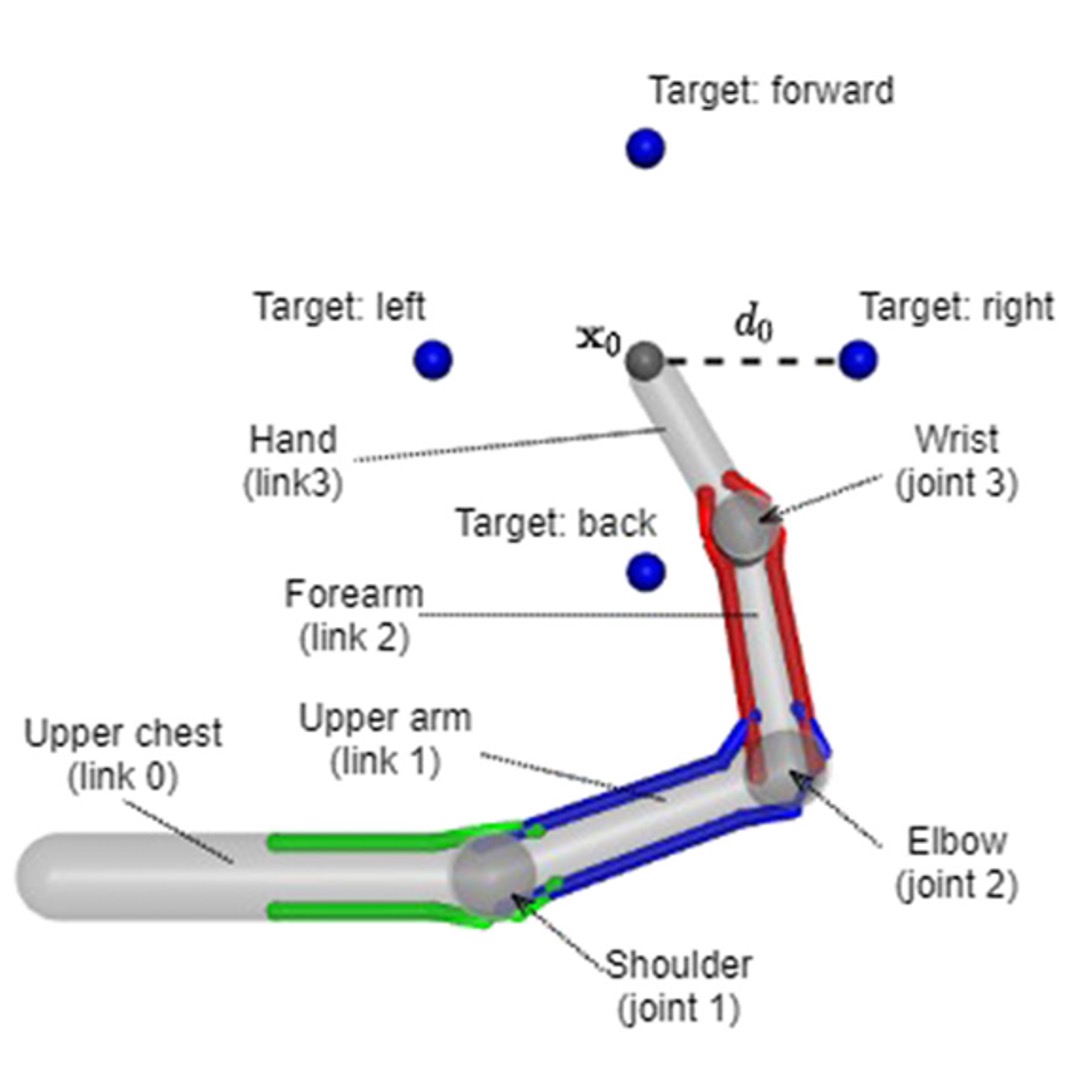
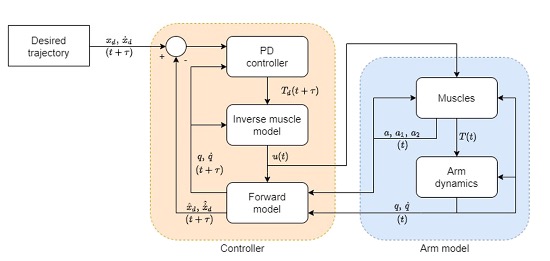
For reaching, the arm model has a high-level controller, crudely simulating motor centres in the brain. It repeatedly compares the hand position to the target and stimulates muscles accordingly. The controller also contains an imaginary copy of the arm model for prediction.
Each joint has a flexor-extensor muscle pair whose force-velocity (FV) properties combine to create “joint-FV space”. This is the area between the upper (+) and lower (-) curves where the middle curve is the joint FV curve. During strong co-contraction, the upper and lower curves have similar magnitudes. The local slope of the joint-FV curve is mechanical damping which is enhanced by co-contraction. The curves rise and fall because of changing activation levels. As the arm (black stick figure inset) approaches the target (red dot), each joint travels along a trajectory through joint-FV space. The shape and direction of the trajectories indicate mechanical interactions between the joints (i.e. multi-body effects such as Coriolis and Euler forces).
|motor unit modelling
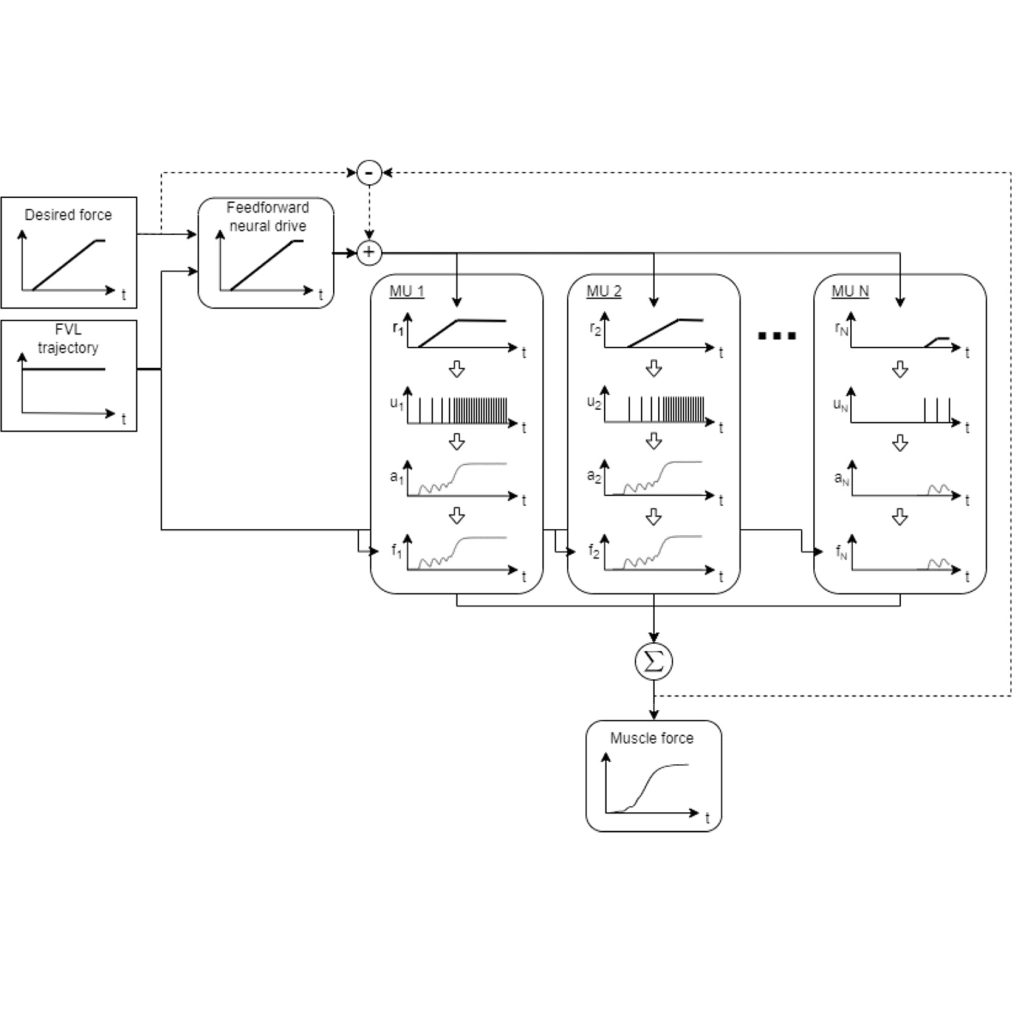
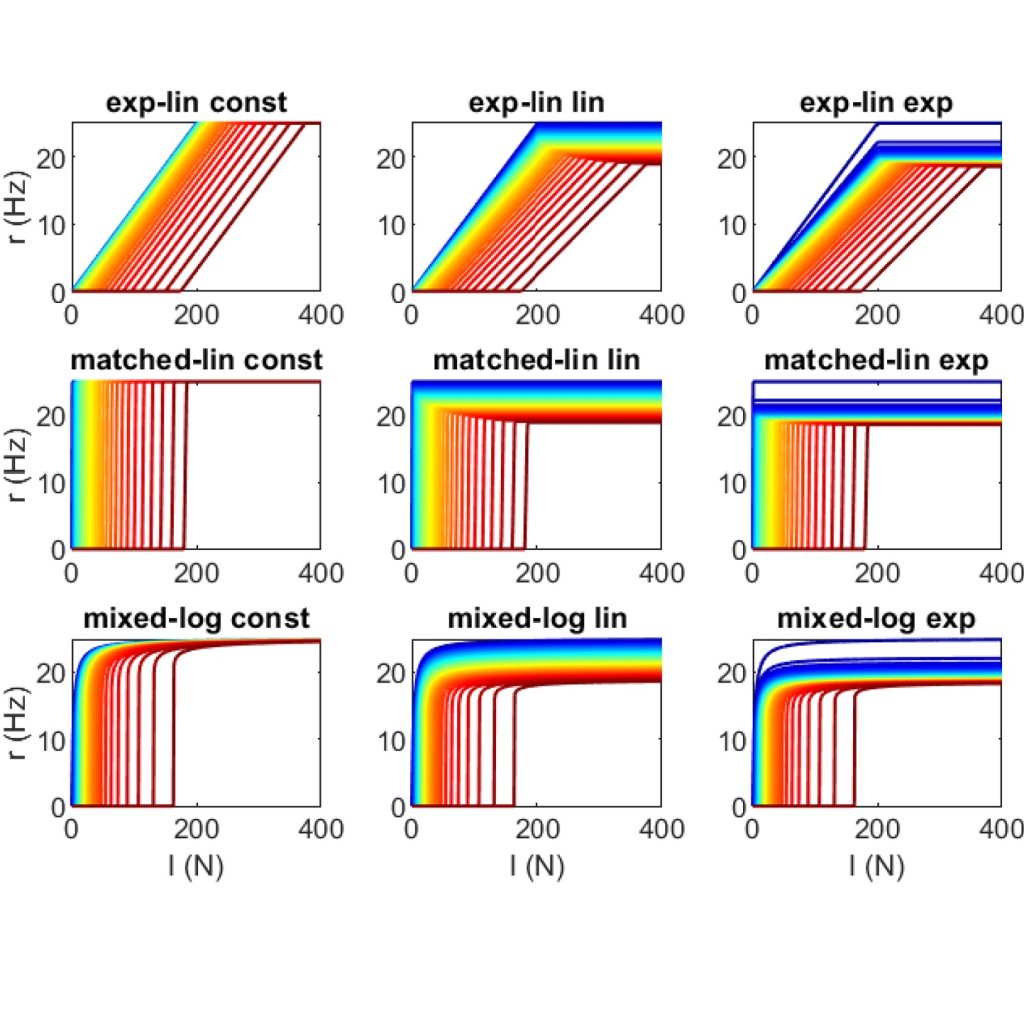
Our model of rate-coded motor unit recruitment creates a complex output from a simple input. As neural drive increases, muscle force increases due to a) increasing motor neurone firing rates and b) recruitment of additional motor units. The intricate details of rate coding and recruitment responses are determined by the characteristics of 9 alternative motor unit models. All models produce physiologically plausible results. Continuing work will incorporate these models into our existing neuromechanical model of human reaching.
Strand 3- Neuromechanics of muscular ageing
|digital ageing of muscle mechanical properties
Using our models of arm reaching, we create computer simulations which we can “digitally age” by systematically altering strength, speed and stiffness. We can compare the “young” versus “old” simulations in terms of reaching speed and accuracy.
|digital ageing of motor unit properties
Coming soon! Using the motor unit model above (strand 2) we can model the effects of ageing on motor unit function.
|motor unit modelling
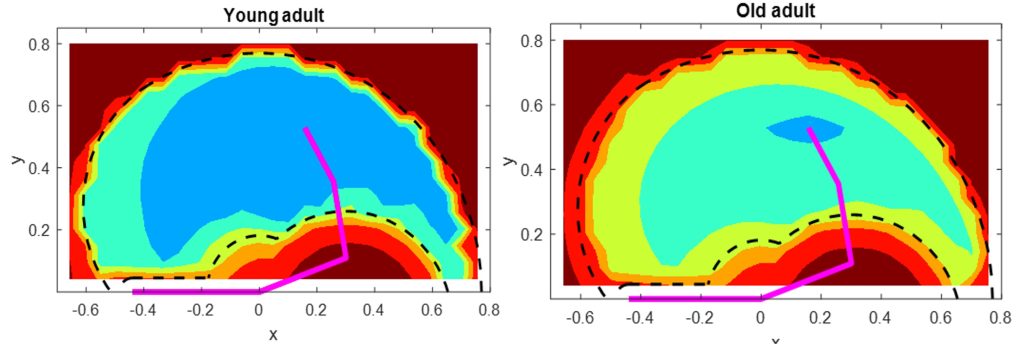
Using an arm model with normal muscle stiffness (“young”) and increased stiffness (“old”) we generated hundreds of simulations to fully explore the reachable space. Accuracy decreased for the “old” simulations, especially for the farthest reach targets.